
The +- 7 g and +- 7 mm may not seem like much, but try playing with 2 rackets in the opposite tails of that distribution and you’ll know what I’m talking about. And this is just the weight and balance, things get much more complicated when we try to figure out where the missing or the extra 7 g are located. From this perspective, I believe it’s correct to not list the swingweight, but when they do it, I think it’s a mistake to list a strung racket swingweight because the weight of the strings you put in a racket also vary up to 5 g or even more. Furthermore, the numbers they list for a racket are an average of the sample size that they measure. If you want any kind of consistent specifications among your rackets or you want to change some parameters for a specific purpose, it’s essential to know and to calculate mass, balance, swingweight, MGR/I etc. of every racket in your bag and not assume that the racket has the specifications of the advertised average. Because of this variations, we match rackets to the desired specifications, by adding weight or sometimes removing it if possible.
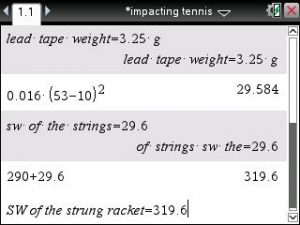
Let’s get back to our example, and take a look at how to calculate the effect of added weight on swingweight. We know the SW of an unstrung racket to be 290. Now we add the strings:
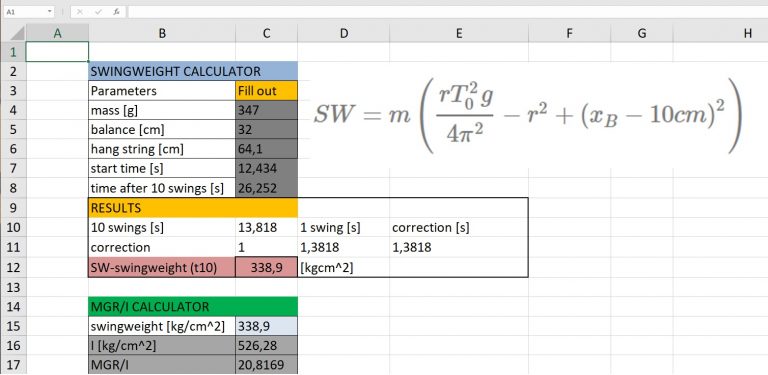
- Strings (m=16 g = 0,016 kg, x=53 cm)
To get the total SW of the strung racket we just use the parallel axis theorem and add the SW of the strings to the SW of the racket.
Using the equation (3) and mass in kilograms, we can calculate the SW of the strings as shown in the picture below.
I selected the strings for the example because while doing modifications it’s very important to plan ahead and know how much the strings add up to swingweight and mass.
Next, let’s take a look at lead tape (1 g) at the top of the hoop or so-called 12 o’clock position:
- Lead tape (m=1 g = 0,001 kg, x=68 cm)
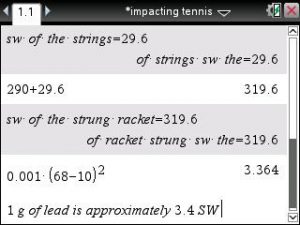
As shown in the picture above 1 g of lead at 12 o’clock is approximately 3, 4 SW. Knowing this is useful for a quick approximation of the SW increase. For more information on the weight of different string check the strings section.
Now let’s suppose we add 5 grams to the handle, more specifically under the grip at a distance of 5 cm from the butt cap and 15 cm from the butt cap:
- Lead tape (m=1 g = 0,001 kg, x=5 cm)
- Lead tape (m=1 g = 0,001 kg, x=15 cm)
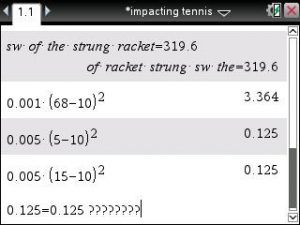
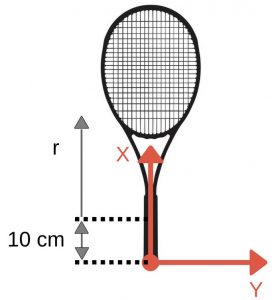
As seen in the picture above, 5 grams at both locations add the same amount of SW, which technically is correct, if SW was just the moment of inertia, because they both have the same distance from the axis of rotation (10 cm from the butt cap). But generally, anything below the distance of 10 cm should not be included in the swingweight calculations. Even any mass on the handle has a very low impact on the swingweight because the distance in the equation is squared. Having more mass on the opposite side of the rotational axis has an impact on the recoil weight but not on the swingweight, but more on that in the recoilweight section.
